Reinforcement Learning for Sequential Robotics Tasks
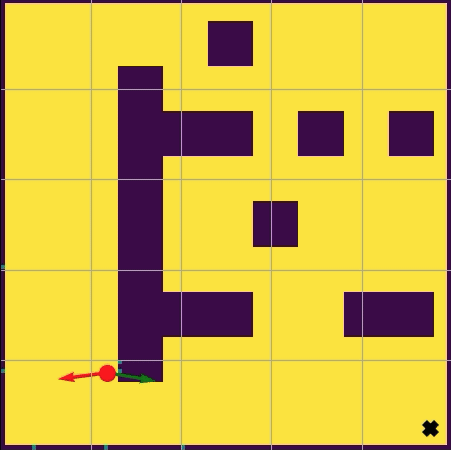
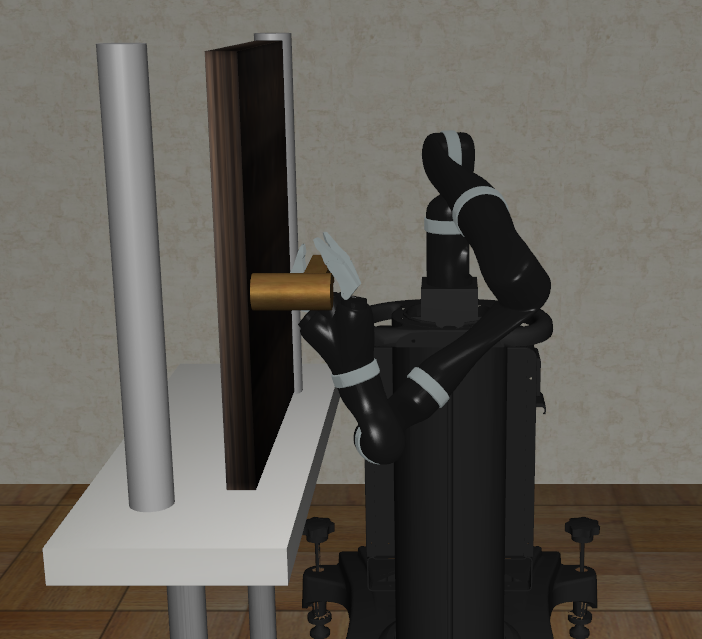
The core of my Master's Thesis, a novel approach to Hierarchical Reinforcement Learning and Reward Decomposition for tasks comprising of sequentially composed subtasks
PythonPyTorchReinforcement Learning